Final Project: Vehicle Speed Estimation from Non-Stationary Camera (GitHub repo)
Final Report
Dependency (for car keypoint detection): OpenPifPaf
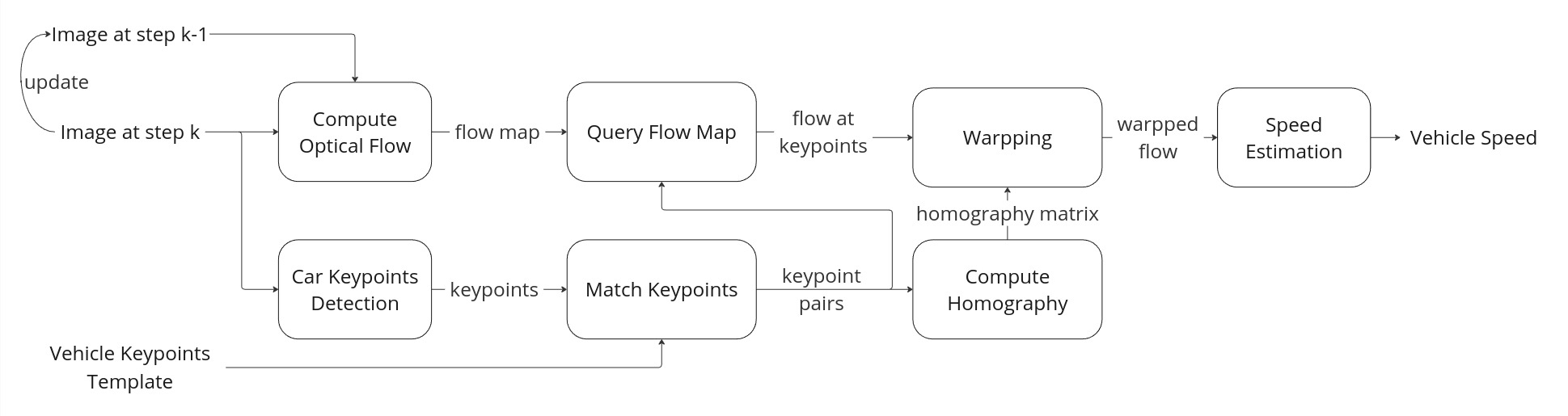
Proposed Pipeline
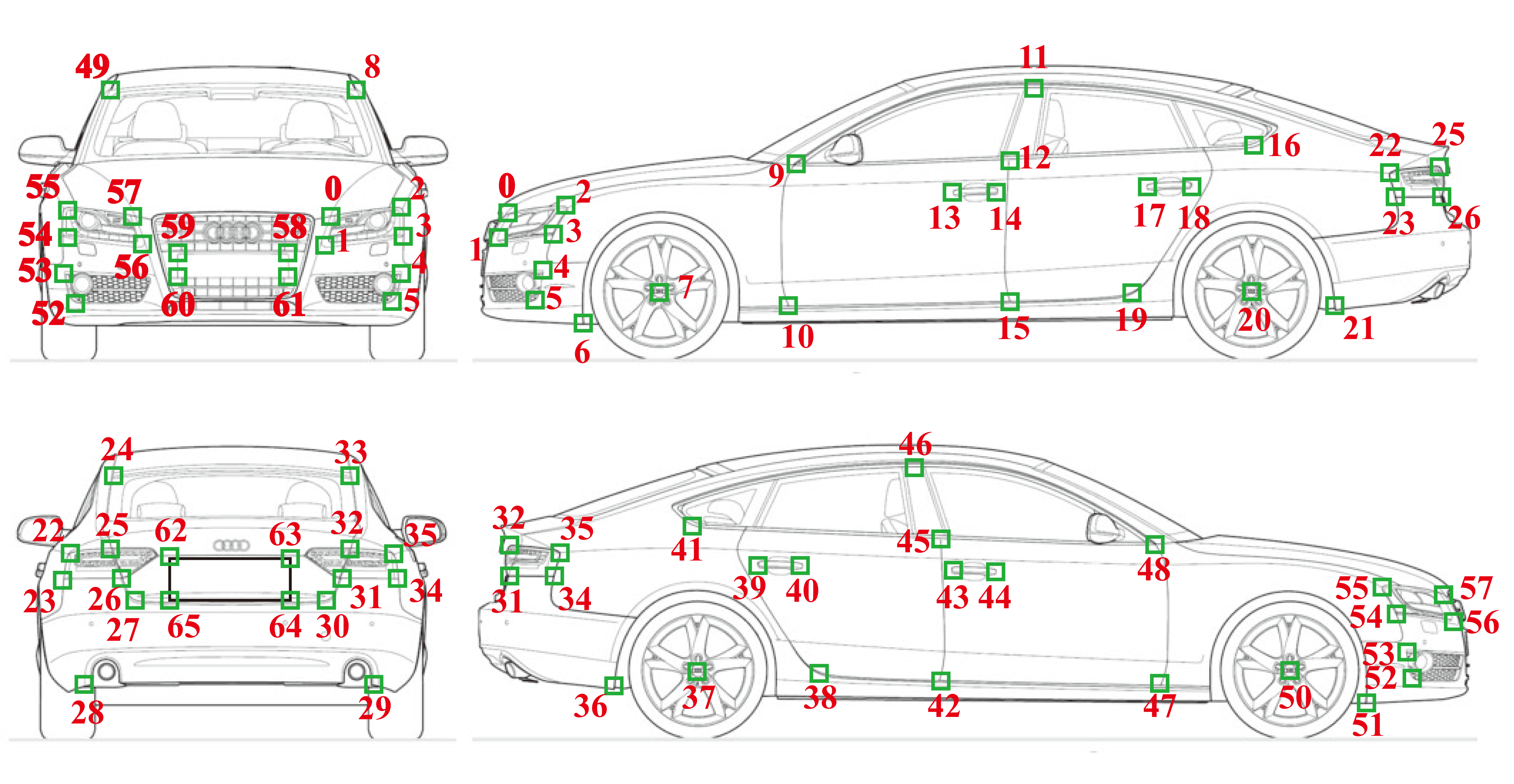
Car Keypoint Model
Demo 1
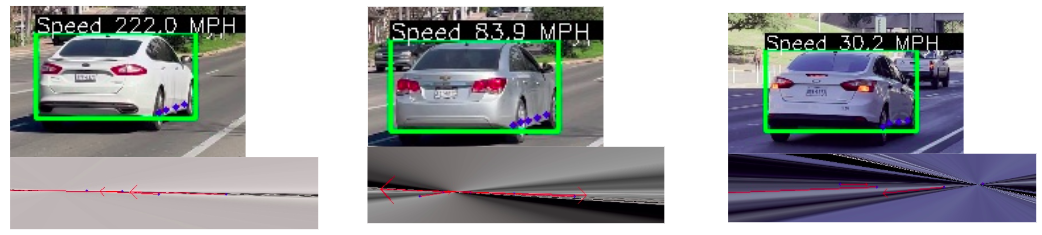
Speed estimation (process offline), keypoints are mark in blue, speed vector are represented by red arrows.
Warpped view
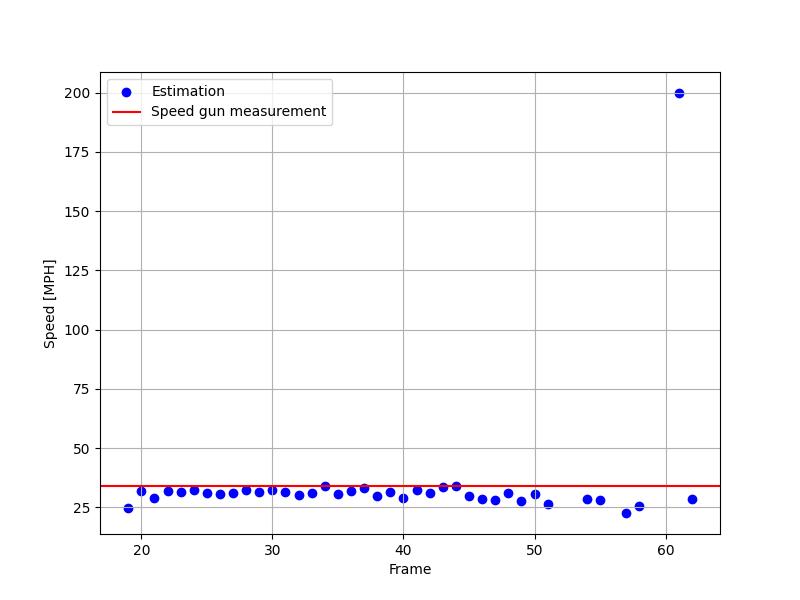
Comparision to speed gun measurment.
Demo 2
Speed estimation (process offline), keypoints are mark in blue, speed vector are represented by red arrows.

Warpped view
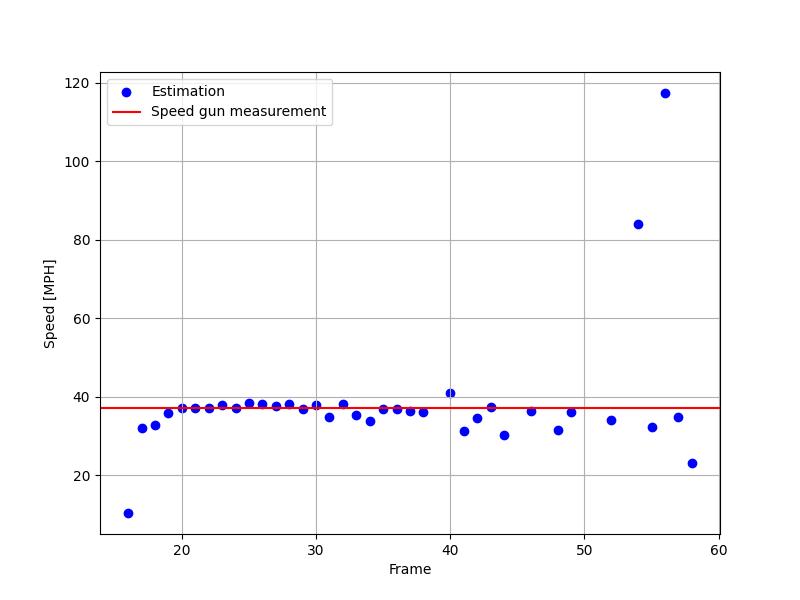
Comparision to speed gun measurment.
Demo 3
Speed estimation (process offline), keypoints are mark in blue, speed vector are represented by red arrows.
Warpped view
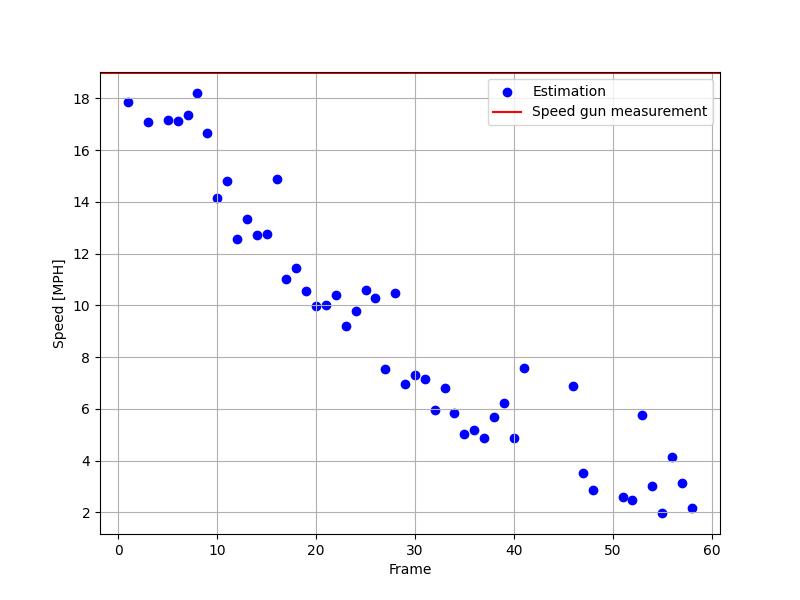
Comparision to speed gun measurment. You can see from the video that the traffic light is turing red, so the estimation result make sense.
Demo 4
Speed estimation (process offline), keypoints are mark in blue, speed vector are represented by red arrows.
Warpped view
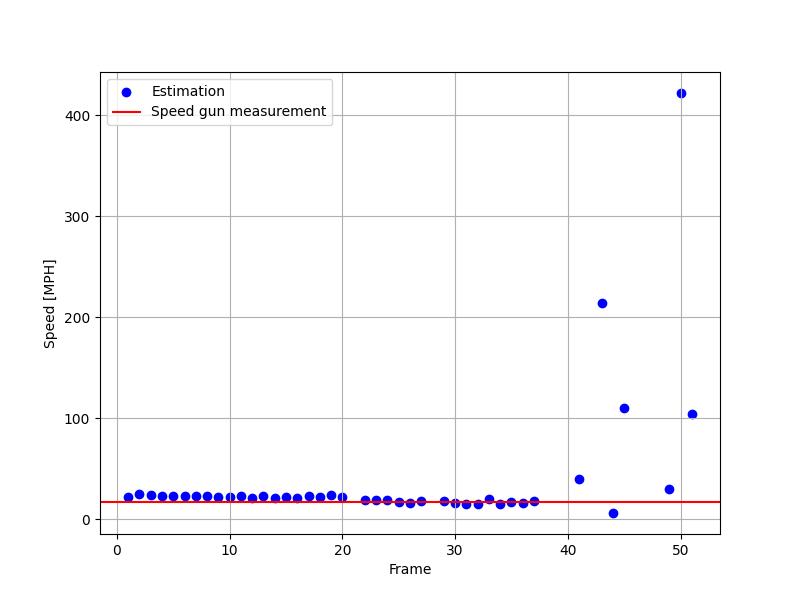
Comparision to speed gun measurment.
Limitation
Currently not handling poor keypoints that can cause singularity issue of the homography matrix. See image below. Due to poor viewing angle, the detected keypoints are almost collinear.